
Foretify Generate
Sensor Simulation
High-fidelity synthetic data generation, grounded in physics and actors’ behaviors, to train and validate perception and E2E AI models in diverse conditions
Improve dataset richness with enriched and varied real-world environmental conditions
An integrated solution leveraging NVIDIA Omniverse and Cosmos Transfer
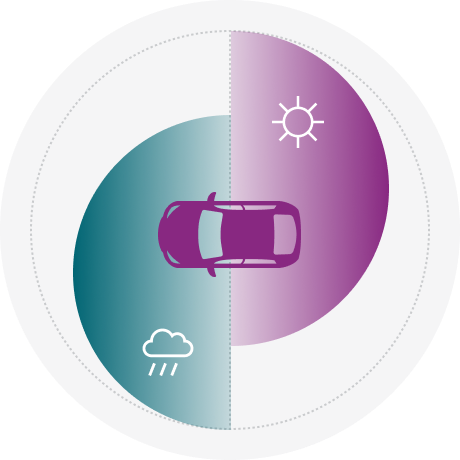
Real-World Variations
Create new and relevant variations of the recorded real-world drive logs for training and validation, reducing the dependency on costly physical driven miles
Improved variability and coverage while maintaining a high-level of realism
ODD Coverage
Generate targeted scenarios to validate the AI powered AV stack and increase testing to close coverage gaps
Accelerate expansion to new geographies with automatic generation of relevant scenarios and distributions

Edge Cases
Generate rare and dangerous scenarios safely in a virtual environment
Generate unscripted tests that expose high priority, unknown critical bugs that would have taken millions of driven miles to encounter
Improve productivity with automatic generation of realistic test and training scenarios

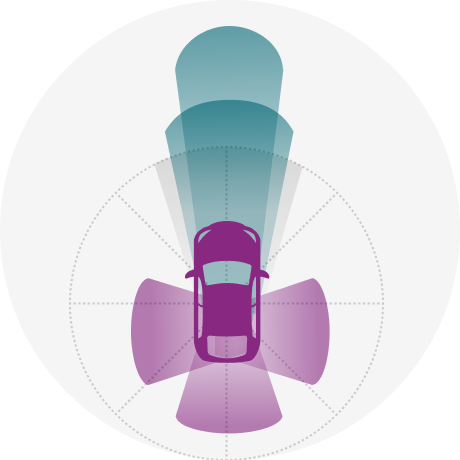
Automated Scenario Generation
Automatically generate diverse, valid, and critical test scenarios with randomized attributes such as locations, lanes, and actor behaviors
Replay simulation and real-world logs and generate behavior and physical variations to train and test scenarios optimized for user specifications
Reduced manual effort with a constrained-random test generator that ensures parameter consistency with system constraints and physics
Generate scenarios on new maps and ODDs with no change to abstract scenario definition
Closed-Loop Simulation
Use reactive actors to dynamically adapt scenario execution at runtime to ensure test conditions meet the intended scenario intent
Reduce manual inspection efforts and optimize compute resources by adjusting rich behavior models in response to AV stack actions
High-fidelity synthetic sensor simulation, grounded in physics and actors’ behaviors leveraging NVIDIA Omniverse and Cosmos Transfer
Over 200 abstract scenarios for urban driving, highways and more, generating millions of concrete scenarios to accelerate AV development while maximizing productivity
Seamless integration with industry-leading simulators and proprietary test platforms to preserve existing investments
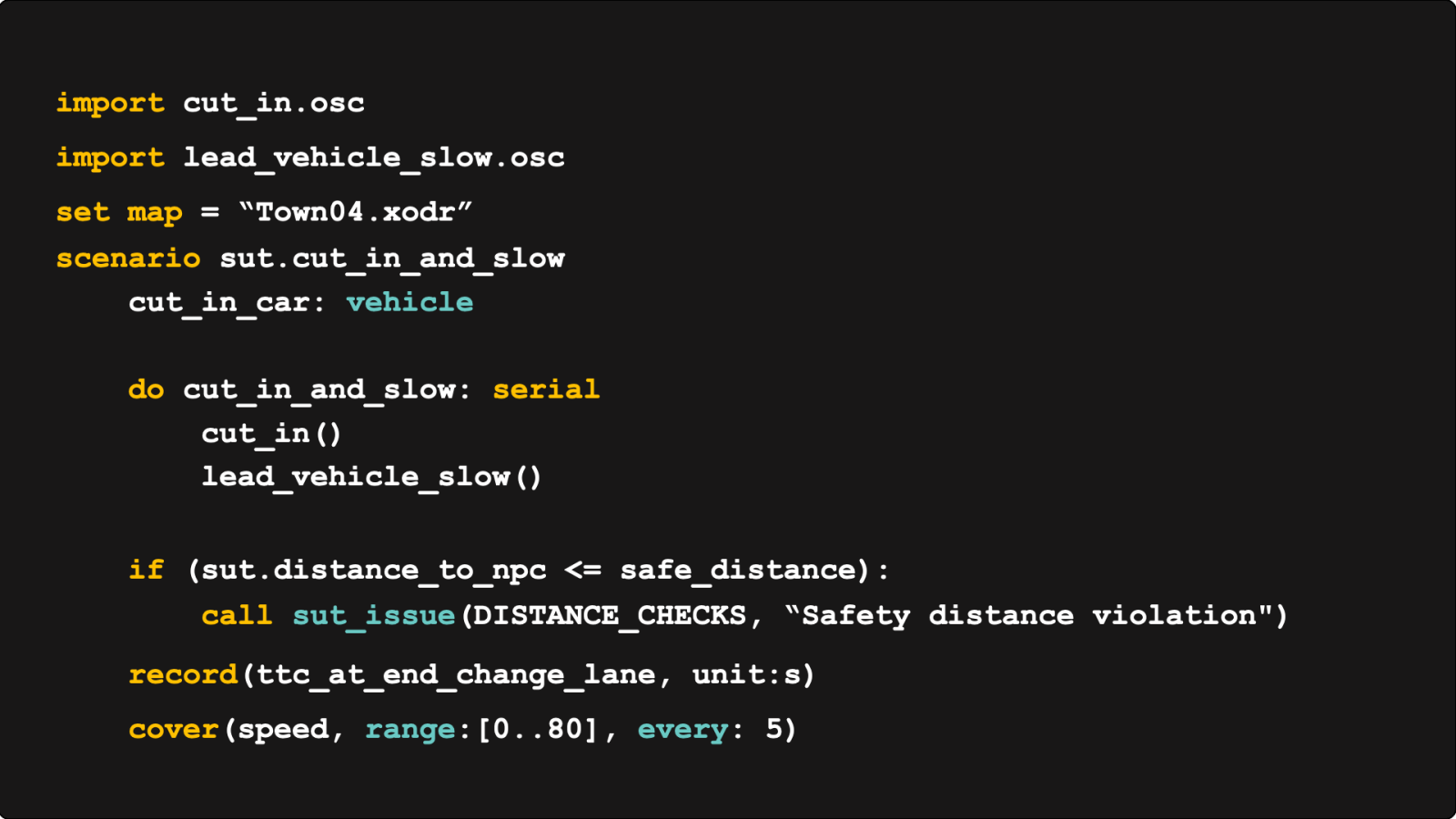
OpenSCENARIO DSL Support
Define abstract scenarios in a modular and reusable formatt using an industry-standard language
Enable seamless scenario reuse across maps, ODDs, and test environments while ensuring formal consistency in scenario parameters, constraints, and metrics

Explore Foretify Evaluate
Evaluate the AV stack’s performance, quality and safety by automatically unifying, fixing, curating and cleansing real-world drive and simulation data to identify relevant and valuable data, coverage gaps and unknowns
Ready to accelerate your journey to AI-powered autonomy?
